Проект «Верный друг» (Робот-собака из Lego Mindstorms)
специалист в области арт-терапии

Описание презентации по отдельным слайдам:
Проект Робот – собака «Верный друг» (робот-игрушка) Автор: Бударный Николай, 6б Руководитель: Филонова И.Л. Муниципальное бюджетное общеобразовательное учреждение средняя общеобразовательная школа №2 г. Болотного
Цель проекта: Разработать и сконструировать модель робота, которая будет по внешнему облику и повадкам похожа на настоящую собаку.
Задачи проекта: 1. Изучить существующие модели роботов-собак. 2. Выбрать способ передвижения. 3. Смоделировать проект робота. 4. Сконструировать модель робота-собаки 5. Запрограммировать робота-собаку на выполнение команд.
Существует различное количество конструкций роботов-собак
Из Lego Mindstorms
Принцип действия датчика заключается в том, что он посылает высокочастотную звуковую волну и принимает обратную волну, которая отражается от предмета. При этом измеряется время, затраченное на возврат ультразвукового импульса. После чего с достаточно высокой точностью может быть рассчитано расстояние до предмета. Звук имеет очень высокую частоту. Поэтому человеческое ухо не может услышать этот звук. Датчик ультразвука
Программирование в среде NXT-G Программа «Косточка» Принцип действия Собака ждёт угощение; Хозяин предлагает ей косточку; Собака грызёт косточку (издаёт звук).
Принцип работы Танк приводится в движение после нажатия датчика касания. Едет по прямой, при встречи препятствия на расстоянии 10 сантиметров, делает разворот вправо на 45 градусов. Программирование в среде NXT-G Программа «Охранник» Принцип действия (алгоритм) Собака двигается вперёд, если видит «чужого» (на расстоянии 20 см), то останавливается и лает, иначе двигается дальше.


Представлена презентация проекта «Верный друг» (робот-собака из Lego Mindstorms NXT) курса внеурочной деятельности «Основы робототехники». В презентации рассказывается о конструировании модели робота и программировании в среде NXT-G. Представлены две программы «Косточка» и «Охранник». В презентации сформулированы цель, задачи и вывод.
Номер материала: ДБ-1201894
Не нашли то что искали?
Вам будут интересны эти курсы:
Оставьте свой комментарий
Подарочные сертификаты
Ответственность за разрешение любых спорных моментов, касающихся самих материалов и их содержания, берут на себя пользователи, разместившие материал на сайте. Однако администрация сайта готова оказать всяческую поддержку в решении любых вопросов, связанных с работой и содержанием сайта. Если Вы заметили, что на данном сайте незаконно используются материалы, сообщите об этом администрации сайта через форму обратной связи.
Все материалы, размещенные на сайте, созданы авторами сайта либо размещены пользователями сайта и представлены на сайте исключительно для ознакомления. Авторские права на материалы принадлежат их законным авторам. Частичное или полное копирование материалов сайта без письменного разрешения администрации сайта запрещено! Мнение администрации может не совпадать с точкой зрения авторов.
MindCub3r по-русски — делаем робота, который может собрать кубик Рубика (статья обновлена)
Не так давно обзавелся набором LEGO MINDSTORMS EV3 (31313) и с удивлением обнаружил, что в русскоязычном сегменте интернета довольно мало интересных материалов и инструкций по сборке и настройке роботов из этого набора. Решил, что нужно это дело исправлять.
Эта инструкция представляет собой вольный перевод материалов с официального сайта проекта MindCub3r и дополнена опытом самостоятельной сборки этого робота, способного собрать кубик Рубика меньше чем за 2 минуты.
Подробнее о LEGO MINDSTORMS EV3 можно почитать на этом сайте.
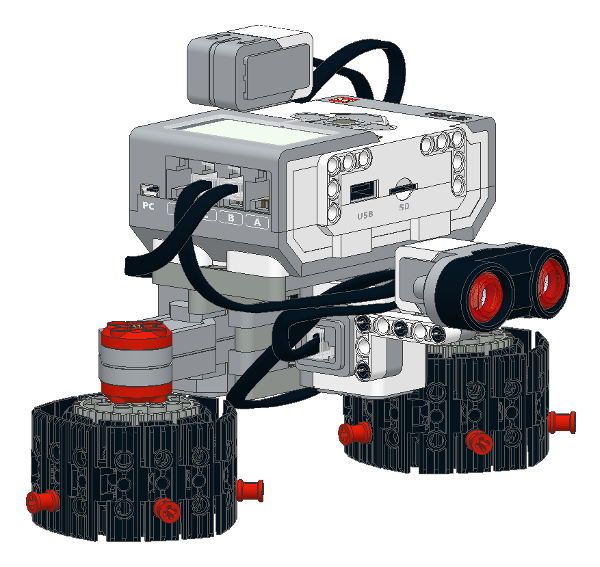
Вот, что у нас должно получится в итоге:
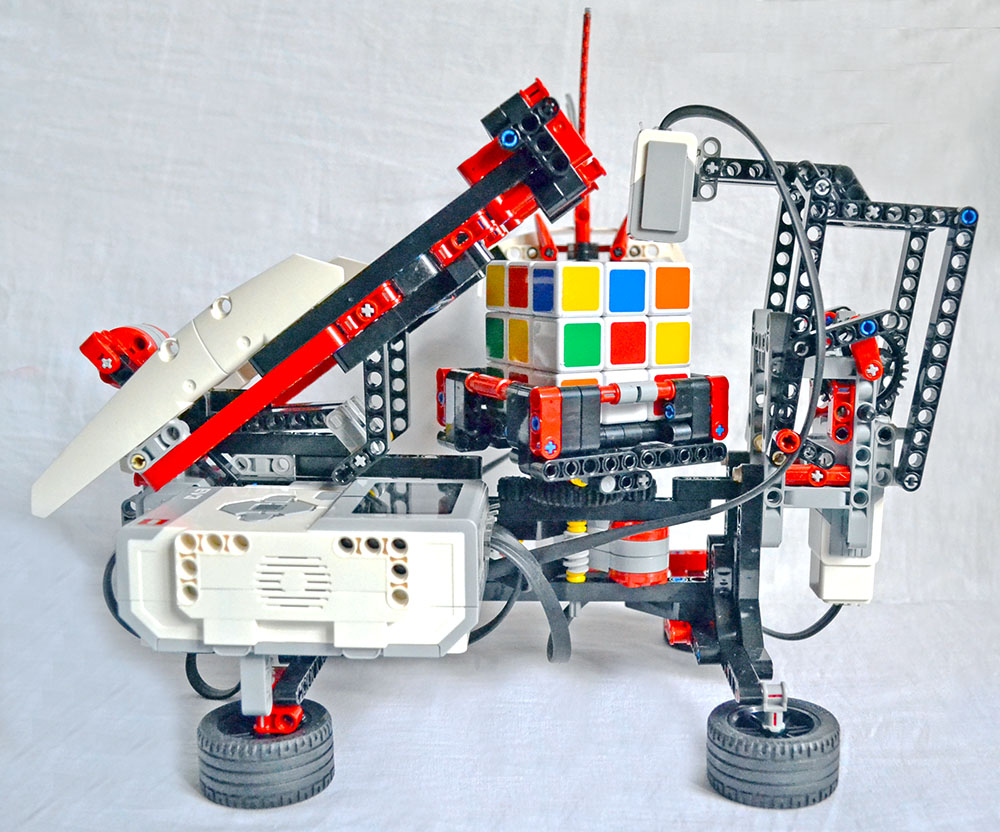
MindCub3r можно построить из одного комплекта Lego Mindstorms EV3 (31313, Home Edition).
Также вам понадобится инструкция по сборке и программное обеспечение, разработанное авторами проекта.
Буквально позавчера автор проекта объявил в своем ФБ, что подправил программное обеспечение для своего робота, и теперь оно работает со «штатной» прошивкой «кирпича» 1.06Н. На главной странице проекта эта информация также уже появилась, архив MindCub3r-v1p1a.zip, содержащий, среди прочего, и обновленную версию программы, уже доступен для загрузки. Загрузка и установка блока для датчика цвета по-прежнему необходима.
Дальнейший текст статьи исправлен с учетом последних изменений на сайте проекта!
Инструкцию по сборке MindCub3r смотрим или скачиваем здесь.
Прошивку (на момент написания статьи EV3-Firmware-V1.06H.bin) для кирпича скачиваем с официального сайта LEGO MINDSTORMS здесь.
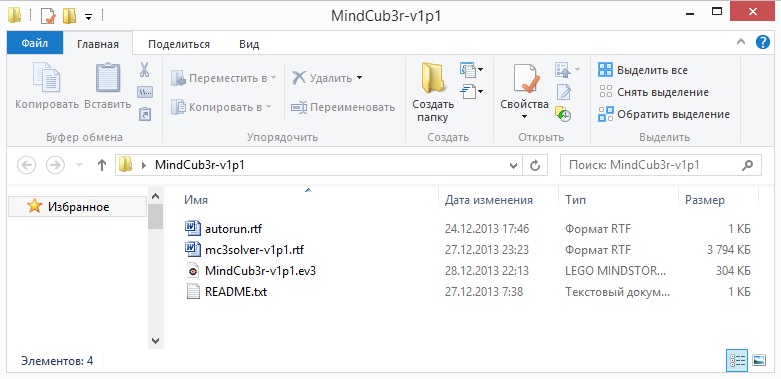
Архив MindCub3r-v1p1a.zip с файлами проекта (MindCuber-v1p1.ev3, autorun.rtf и mc3solver-v1p1.rtf) качаем тут.
Еще нам понадобится прошивка для датчика цвета, которую берем здесь. Все дело в том, что стандартные настройки этого датчика не корректно определяют цвета в режиме RGB.
После того, как вы соберете робота и скачаете себе на компьютер все необходимое, можно приступать к настройке.
Если вы еще не обновили прошивку «кирпича» первым делом устанавливаем новую версию ПО для главного блока Mindstorms EV3:
1. Запускаем программное обеспечение LEGO MINDSTORMS EV3;
2. Выбираем Инструменты — Обновление встроенного ПО;

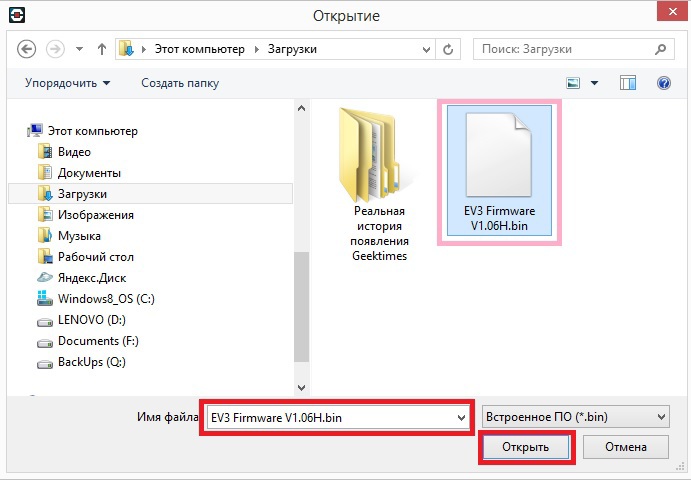
3. В появившемся диалоговом окне нажимаем «Просмотреть», находим предварительно закаченный файл EV3-Firmware-V1.06H.bin и жмем «Открыть»;
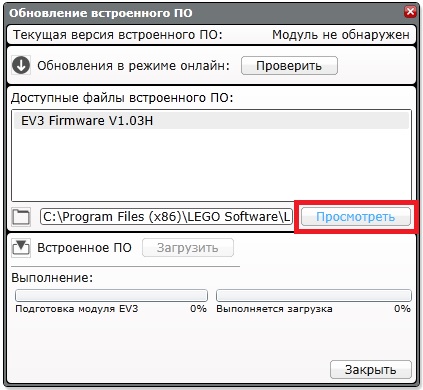
4. В диалоговом окне в таблице «Доступные файлы встроенного ПО» выбираем EV3-Firmware-V1.06H и жмем «Загрузить». Ждем окончания загрузки;

5. Перезагружаем главный блок (выключаем и снова включаем).
Далее устанавливаем прошивку для датчика цвета:
1. В ПО LEGO MINDSTORMS EV3 открываем новый пустой проект;
2. Выбираем Инструменты — Мастер импорта блоков;
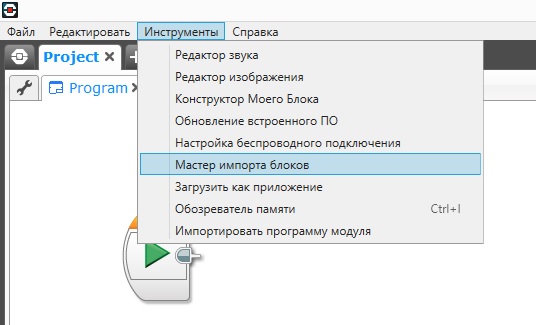
3. В появившемся диалоговом окне нажимаем «Просмотреть», находим предварительно загруженный файл ColorSensorRGB-v1.00.ev3b и жмем «Открыть»;

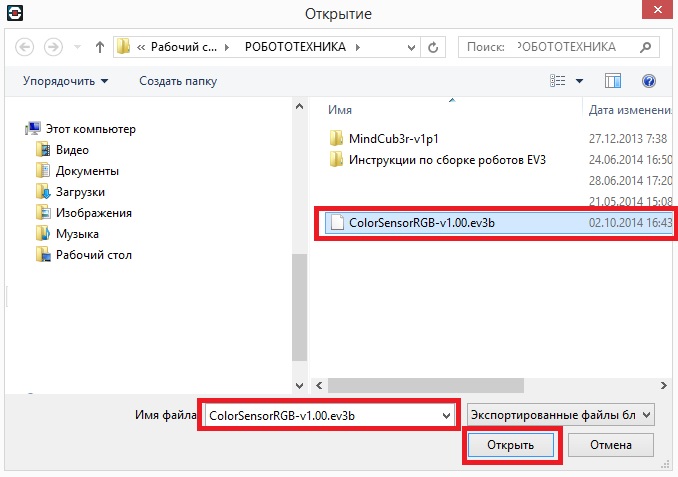
4. В диалоговом окне в таблице «Выбрать блоки для импорта» выбираем ColorSensorRGB-v1.00.ev3b и жмем «Импорт».
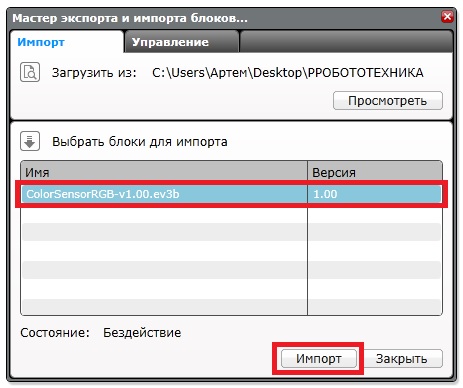
5. Для завершения установки закройте диалоговое окно и выйдите из программного обеспечения LEGO MINDSTORMS EV3.
Теперь самый ответственный момент — загрузка программы робота в кирпич:
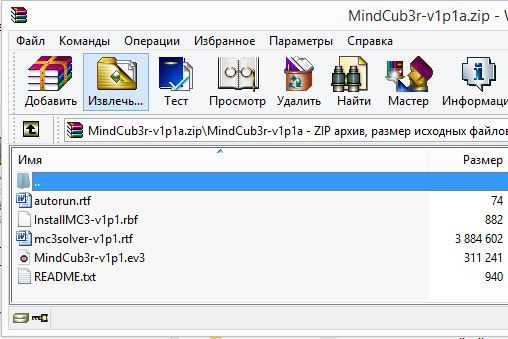
1. Распаковываем предварительно загруженный архив MindCub3r-v1p1a.zip;
2. Запускаем ПО LEGO MINDSTORMS EV3;
3. Выбираем Файл — Открыть проект, ищем файл MindCub3r-v1p1.ev3, распакованный из архива MindCub3r-v1p1.zip и жмем «Открыть»;
4. После открытия проекта загружаем его в «кирпич». Загружаем, но НЕ ЗАПУСКАЕМ.

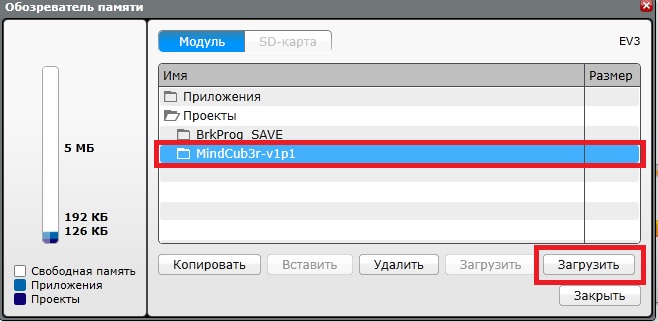
5. Идем в Инструменты — Обозреватель памяти (Ctrl+I);

6. Выбираем (выделяем) во вкладке «Модуль» или «SD-карта» папку проекта «MindCub3r-v1p1»;
7. Нажимаем «Загрузить»;
8. Находим файл mc3solver-v1p1.rtf, распакованный из архива MindCub3r-v1p1a.zip и нажимаем «Открыть»;
9. Еще раз нажимаем «Загрузить», предварительно убедившись, что папка проекта «MindCub3r-v1p1» все еще выделена;
10. Находим файл InstallMC3-v1p1.rbf, распакованный из архива MindCub3r-v1p1a.zip и нажимаем «Открыть»;
11. Закройте диалоговое окно, выйдите из программы и перезагрузите модуль.
Последний этап — устанавливаем приложение MC3 Solver на главном модуле:
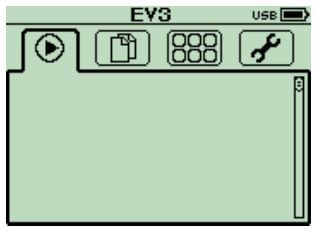
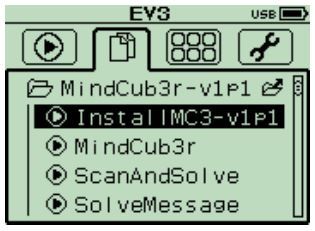
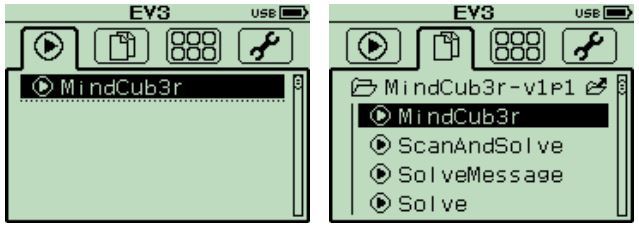
2. Находим во второй вкладке папку проекта MindCub3r-v1p1 (в памяти блока или на SD-карте):

3. Выбираем файл InstallMC3-v1p1 и нажимаем на центральную кнопку модуля для установки:
4. В третьей вкладке проверяем наличие установленного приложения MC3 Solver v1p1:

5. Перезагружаем блок.
6. В третьей вкладке блока запускаем приложение «MC3 Solver v1p1» для начала работы программы mc3solver-v1p1.rtf:
Всё! MindCub3r готов к использованию!
7. Запускаем программу в первой или во второй вкладке блока:
После запуска программы робот попросит вложить кубик («Insert cube») и начнет его сканировать датчиком цвета.
После сканирования робот ненадолго задумается и начнет сборку.
Удачное решение задачи ознаменуется радостным вращением кубика.
Вот, собственно, процесс работы робота:
Выше описан идеальный сценарий, на практике же все немного хуже — датчик может не правильно определить цвета — всего робот может провести 3 (три) цикла сканирования до того, как выдаст ошибку (Scan error). После этого нужно изъять кубик и снова вложить в робота. Причиной этому может быть или низкий заряд батареи модуля или «неправильный» кубик.
У меня иногда проходило по 3-5 повторов (3 цикла сканирования и одно изъятие) прежде чем робот принимался за сборку, но результат того однозначно стоит.
Если у вас остались вопросы, задавайте их в комментариях к статье, с удовольствием на них отвечу.
Мойщик пола LEGO EV3

![]()
Робот мойщик пола передвигается за счёт поворотов двух дисков параллельно полу. С помощью резинок на диски можно закрепить смоченные моющим раствором тряпки и тогда ваш пол станет немного чище.
Конструкция робота простая и собрать его можно очень быстро. Инструкцию для сборки вы можете найти ниже. Я использовал набор LEGO Mindstorms Education EV3 (45544), при большом желании можно сделать аналогичного робота из домашней версии (31313), но тогда нужно будет менять программу.
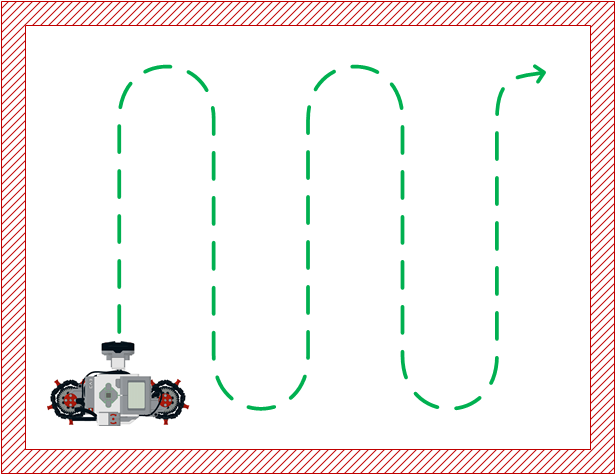
Чтобы робот помыл пол, написана простая демонстрационная программа. Программа рассчитана на то, что помещение будет прямоугольное. Робота нужно расположить в углу комнаты, чтобы рядом слева была стенка. После этого программу можно запускать. Ниже на схеме показано как двигается робот.
К сожалению, стандартный гироскоп LEGO не очень точно измеряет угол поворота и робот может постепенно уходить с прямой линии, поэтому лучше, если помещение будет поменьше. А ещё лучше использовать более точный гироскоп стороннего производителя.
А вот видео, где вы сможете оценить, как двигается робот:
 Инструкция для сборки робота мойщика пола из конструктора LEGO Mindstorms EV3 Версия:от 12.09.2015 Инструкция для сборки робота мойщика пола из конструктора LEGO Mindstorms EV3 Версия:от 12.09.2015  | |
 12.09.2015 12.09.2015  1.76 MB 1.76 MB  26101 26101 |  |
 Демонстрационная программа для робота мойщика пола Версия:от 12.09.2015 Демонстрационная программа для робота мойщика пола Версия:от 12.09.2015 | ||
| Инструкция для сборки исследователя EV3 Версия:2 | |
| 04.06.2016 4.95 MB 9637 | |
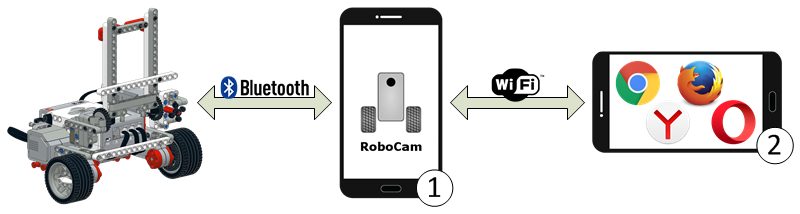
Готовим Android-смартфон и приложение RoboCam
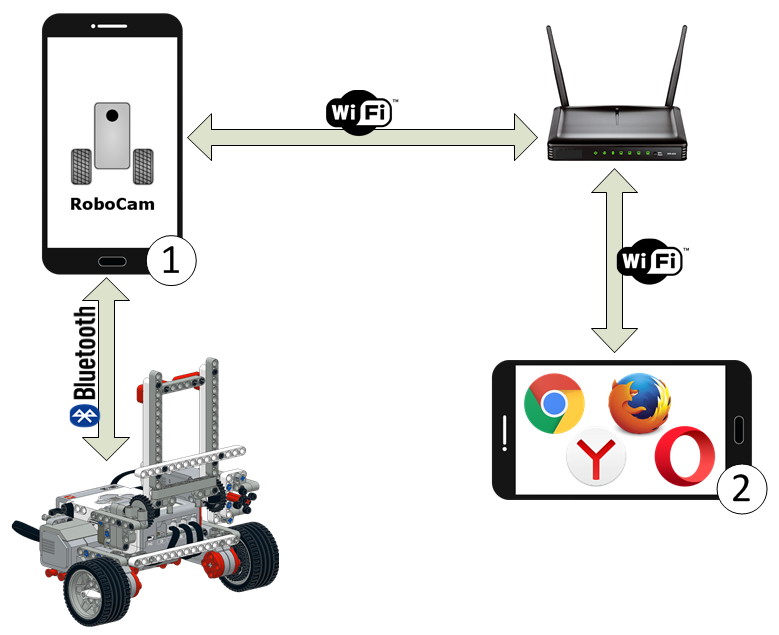
Приложение RoboCam работает на смартфонах или планшетах под управлением операционной системы Android 2.3 и выше. Обязательным является наличие у устройства любой встроенной камеры и модулей Bluetooth и WiFi. Приложение бесплатное, вы можете установить его с помощью магазина Google Play. Вот страничка приложения RoboCam. Для установки нажмите кнопку «УСТАНОВИТЬ», и примите требуемые разрешения, нажав на кнопку «ПРИНЯТЬ».
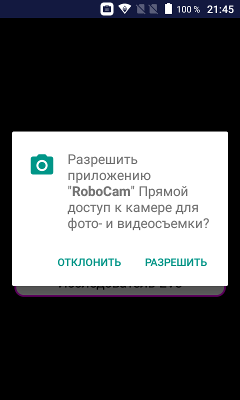
После установки откройте приложение. В Android 6 и выше, вы сразу увидите запрос на разрешение использовать камеру. Камера нам обязательно нужна, поэтому нажмите «РАЗРЕШИТЬ».
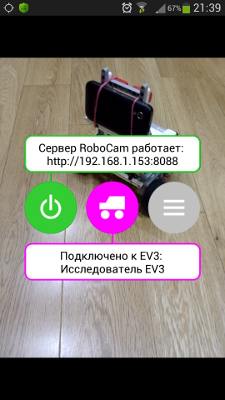
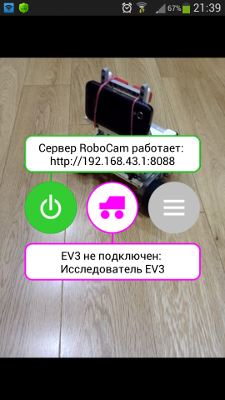
После того как приложение откроется вы увидите, три круглые кнопки для основных действий, а на заднем плане картинку с камеры.
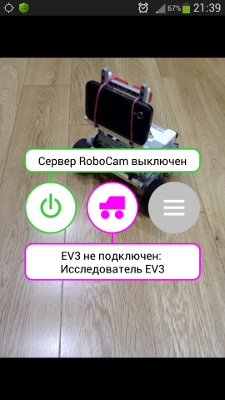
Зелёная кнопка слева отвечает за запуск и остановку сервера RoboCam, который нужен для подключения смартфона или планшета 2, см. схему выше. Одновременно кнопка показывает, работает сервер или нет. На картинке фон кнопки белый, это значит, что сервер не работает. Об этом же говорит подсказка сверху. Вы можете в любой момент запустить или остановить сервер, нажав на эту кнопку.
Средняя кнопка пурпурного цвета отвечает за подключение к роботу EV3. Одновременно кнопка показывает, подключен ли смартфон к роботу или нет. На картинке, фон кнопки белый, это значит, что робот не подключен. У этой кнопки тоже есть подсказка, прямо под кнопкой, где в верхней строке отображается состояние подключения (на картинке это надпись «EV3 не подключен»), а в нижней строке – название текущих настроек робота (на картинке это «Исследователь EV3»).
Кнопка справа открывает настройки программы RoboCam. Если вы будете использовать моего Исследователя EV3, то дополнительно ничего настраивать не надо, т.к. сразу после первого запуска приложения по умолчанию будут выбраны настройки с названием «Исследователь EV3». Если робот у вас другой, то сначала придётся поковыряться в настройках. Но об этом поговорим ниже.
Запуск сервера RoboCam и подключение к нему
Сразу скажу, что совсем неважно, что вы сделаете раньше, запустите сервер RoboCam или подключите смартфон к роботу. Это можно сделать в любом порядке.
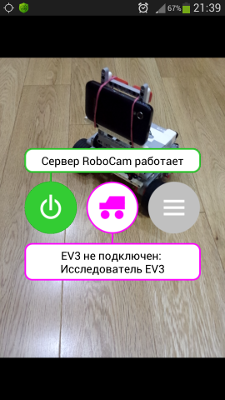
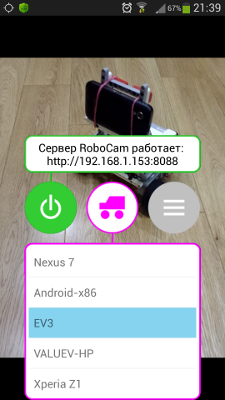
Итак, после того как приложение установлено на смартфон 1 (см. схемы выше) и открыто, вы можете запустить сервер RoboCam. Для этого нажмите на зелёную копку слева, при этом кнопка начнёт мигать, а в подсказке будет написано «Инициализация сервера RoboCam. ». Через некоторое время, после того как сервер запустится, фон кнопки окрасится в зелёный цвет, а в подсказке будет написано «Сервер RoboCam работает».
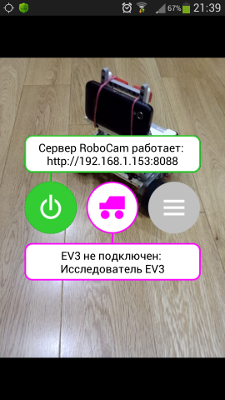
Если смартфон ещё не подключен к вашему Wi-Fi-роутеру (как у нас на картинке), то пора это сделать. После подключения в верхней подсказке во второй строке отобразится адрес для подключения к серверу RoboCam. При включении сервера нет разницы, что включать сначала, сервер RoboCam или Wi-Fi.
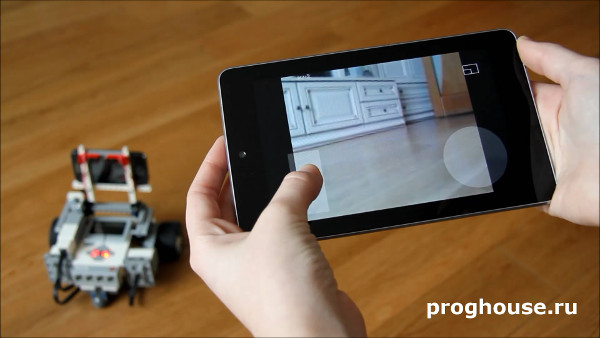
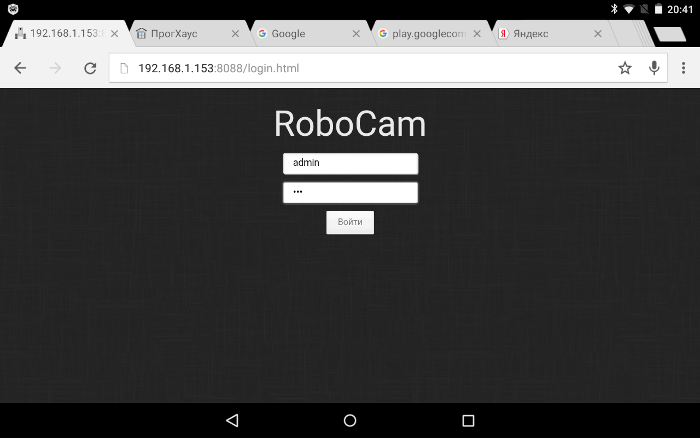
Теперь вы можете подключиться к серверу RoboCam. Для этого возьмите второй смартфон или планшет (я буду использовать планшет), убедитесь, что он подключен к тому же Wi-Fi-роутеру, откройте браузер и перейдите на страничку с адресом, который показан в подсказке в приложении RoboCam (на картинке это «http://192.168.1.153:8088»). Браузер нужно использовать один из тех, про которые было написано выше. Если вы всё сделали правильно, то в браузере загрузится страничка для ввода логина и пароля. Введите здесь логин и пароль и нажмите кнопку «Войти». Если после установки вы ничего не меняли в настройках, то по умолчанию установлен логин «admin» и пароль «123».
После этого откроется основная страничка сервера RoboCam, на которой вы увидите картинку с камеры смартфона 1 (см. схему выше).
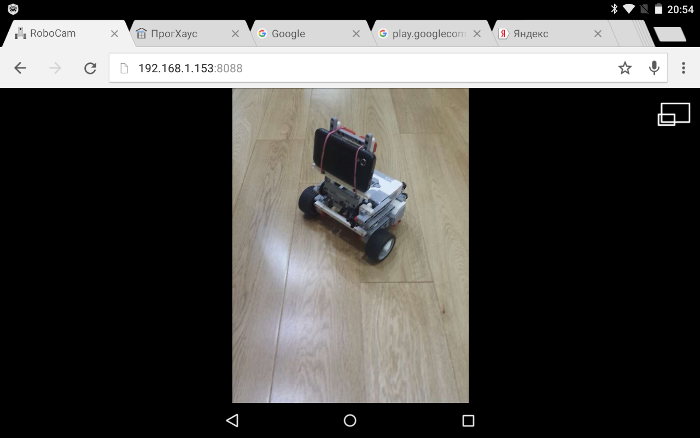
Как видите ориентация смартфона 1 – портретная, а моего планшета – альбомная. Вы можете перевернуть смартфон 1 так, чтобы он тоже был в альбомной ориентации. При этом картинка в на планшете автоматом поменяется на альбомную.
Обратите внимание, что ориентация не меняется, если вы заблокировали смартфон 1.
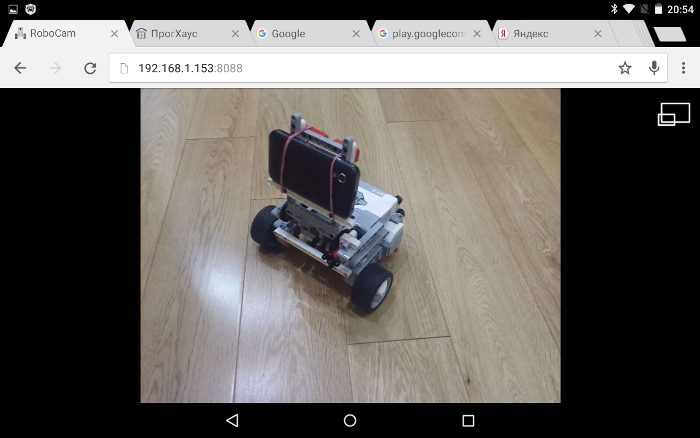
Чтобы теперь сделать изображение на весь экран, нажмите на значок  справа сверху на странице. Так уберутся все ненужные нам кнопочки, закладки браузера и т.д., а изображение с камеры станет крупнее.
справа сверху на странице. Так уберутся все ненужные нам кнопочки, закладки браузера и т.д., а изображение с камеры станет крупнее.

Подключение RoboCam к EV3
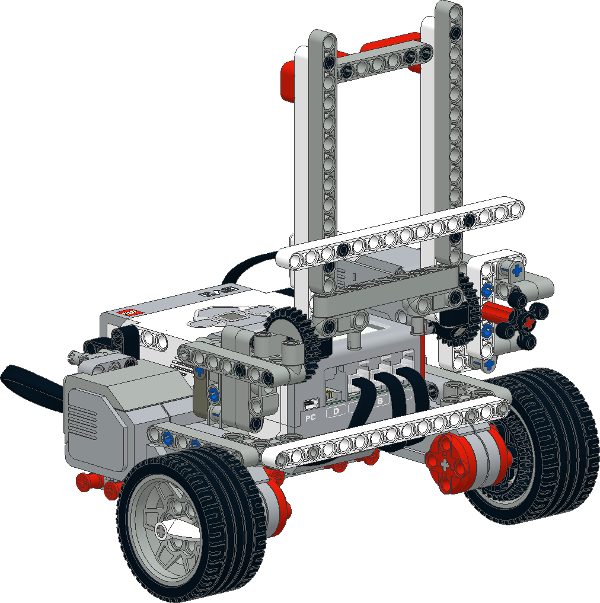
Прежде чем подключать приложение RoboCam к EV3 убедитесь, что у вашего робота EV3 и смартфона включён Bluetooth и что они спарены. Также убедитесь, что моторы подключены именно к тем портам, которые указаны в настройках робота. Название текущих настроек написано в подсказке к средней кнопке во второй строке, на картинке ниже, это «Исследователь EV3». Если вы собрали Исследователя EV3 по моей схеме (см. выше) и после установки приложения RoboCam не меняли настройки, то будьте уверены, что всё настроено правильно. Подробно о настройках будет написано ниже.
Итак, если всё готово, нажмите на центральную пурпурную кнопку. Если у вас на смартфоне Bluetooth оказался выключен, то вы увидите запрос на его включение. Нажмите «Да».
Дальше вы увидите, что кнопка начнёт мигать, а вместо подсказки появится список спаренных через Bluetooth устройств. Выберите здесь вашего робота EV3 (на картинке – это «EV3», но у вас в настройках EV3 может быть выставлено другое имя).
После этого приложение подключится к EV3.
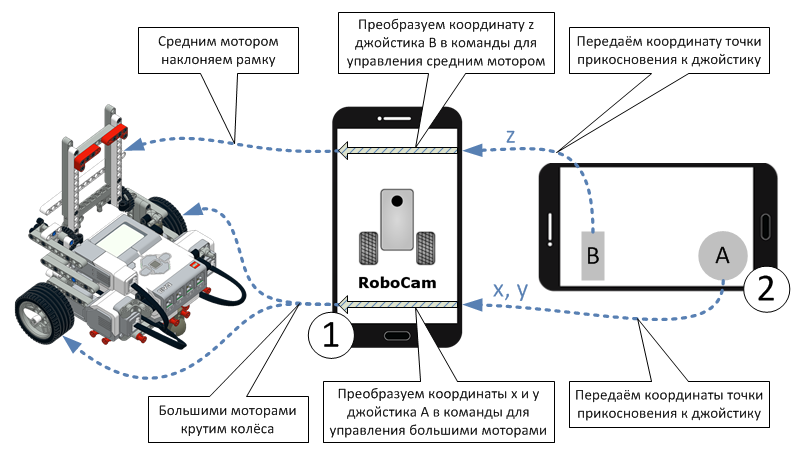
Если в это время клиент подключен к серверу RoboCam, то вы увидите, как появятся джойстики (прямоугольный и круглый джойстики на картинке снизу). После этого вы сразу можете управлять роботом.

В настройках по умолчанию для Исследователя EV3 у вас будут два джойстика: круглый и вертикальный (см. картинку выше). Вертикальным джойстиком управляется рамка-держатель смартфона, а круглым – движения робота. Иконка с изображением ладони сверху справа, меняет джойстики местами, чтобы быстро переключать управление для левши и правши. Подробнее о джойстиках будет написано ниже.
Остановка сервера RoboCam и отключение EV3
После того как вы закончили управлять роботом перед тем как закрыть приложение RoboCam рекомендуется остановить сервер RoboCam и отключить EV3 от смартфона. Это можно делать в любом порядке. Для того чтобы остановить сервер нажмите на зелёную кнопку слева. После этого фон кнопки станет белым, а подсказка покажет «Сервер RoboCam выключен». Чтобы отключить EV3, нажмите на центральную пурпурную кнопку. После этого фон кнопки станет белым, а на подсказке в верхней строке вы увидите надпись «EV3 не подключен». При этом моторы остановятся или примут первоначальное положение в зависимости от настроек.
Настройки сервера RoboCam
Чтобы перейти в настройки, нажмите на серую кнопку справа.
Настройки разделены на 2 части: настройки сервера и настройки робота. Сначала давайте посмотрим, что есть в настройках сервера. Выберите «Сервер».
Настройки сервера делятся на 2 группы: настройки камеры и настройки безопасности. В настройках камеры можно выбрать камеру (фронтальную или тыловую), размер изображения и качество JPEG. Чем меньше вы установите размер изображения, тем плавнее и быстрее будет передача видео клиенту, но ухудшится качество картинки. Аналогично влияет передачу видео и качество JPEG: чем лучше качество JPEG (90 и более процентов), тем лучше картинка, но медленнее скорость, и наоборот, чем хуже качество JPEG (40 и менее процентов), тем быстрее скорость, но хуже картинка. Выберите то, что оптимально для вас.
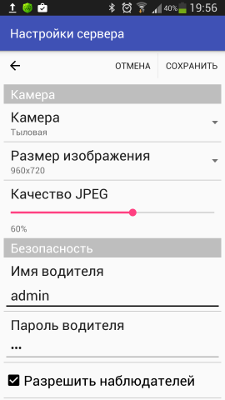
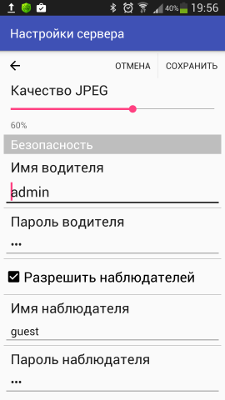
В настройках безопасности вы можете поменять имя и пароль водителя (по умолчанию – имя «admin» и пароль – «123»). Также по умолчанию включены наблюдатели. Наблюдатели могут параллельно с вами видеть изображение с камеры, но не могут управлять роботом. Для наблюдателя также можно задать имя и пароль (по умолчанию здесь используется имя «guest» и пароль «123»). Чтобы выключить наблюдателей, уберите галку «Разрешить наблюдателей».
Количество водителей и наблюдателей не ограничено, однако подключение более одного водителя может вызвать конфликты при одновременном управлении и передаче видео потока. Не рекомендуется подключаться к серверу RoboCam более одного водителя. Большое количество наблюдателей может также негативно сказаться на передаче видео. Желательно уменьшить количество наблюдателей до минимума или вообще отключить эту функцию.
После изменения настроек, вы можете сохранить их, нажав на кнопку «СОХРАНИТЬ» справа сверху или выйти без сохранения, нажав на кнопку «ОТМЕНА» или стрелку слева сверху. После сохранения настроек сервера клиенты могут быть отключены, и нужно будет подключаться снова.
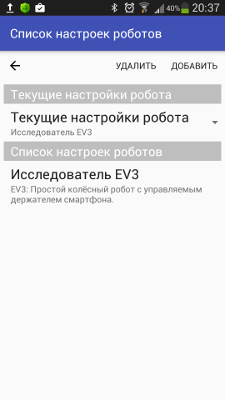
Список настроек роботов
Вторая часть настроек программы RoboCam – это настройки роботов. Нажмите «Робот», чтобы перейти к списку настроек роботов.
В списке настроек роботов вы можете увидеть настройки для всех ваших роботов. Вы в любой момент можете добавить или удалить настройки нажав, соответственно, кнопку «ДОБАВИТЬ» или «УДАЛИТЬ» сверху справа. А сразу под кнопками вы можете увидеть текущие настройки. С помощью этого пункта происходит переключение между настройками для ваших роботов. Теперь давайте посмотрим настройки Исследователя EV3. Для этого выберите в списке «Исследователь EV3».
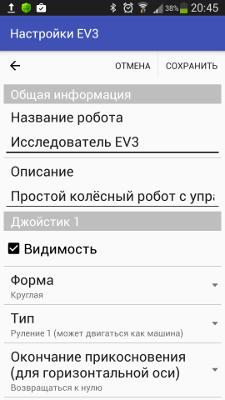
В самом верху указана общая информация: название робота и описание. Название и описание отображаются в списке, чтобы вы могли легко найти нужные настройки. Также название отображается в основном экране программы под центральной кнопкой, с помощью которой вы подключаетесь к EV3. Ниже идут настройки джойстиков.
Всего вы можете настроить до 4-х джойстиков, но одновременно на экране у клиента будет видна только одна пара джойстиков 1-2 или 3-4. Однако если вы будете использовать джойстик 1 и 3, то они всё равно не будут видны одновременно, т.к. относятся к разным парам, и вы будете видеть либо джойстик 1, либо джойстик 3. Видимость каждого джойстика включается галочкой «Видимость». Если вы включили 2 пары джойстиков, то на экране клиента появится кнопка  для переключения между парами.
для переключения между парами.
Итак, в настройках вы можете увидеть группы «Джойстик 1», «Джойстик 2», «Джойстик 3» и «Джойстик 4». В каждой из них собраны настройки для одного джойстика. Давайте посмотрим настройки для «Джойстика 1». Галочка «Видимость», как вы уже поняли, показывает или прячет джойстик. Если галочка не установлена, то и настройки для этого джойстика будут спрятаны.
Чуть ниже в выпадающем списке «Форма» вы можете выбрать форму джойстика, а вместе с формой и его характеристики. Доступны следующие формы джойстиков: вертикальная, горизонтальная, круглая, квадратная, стрелки, вертикальные стрелки и горизонтальные стрелки. Вот как выглядят перечисленные джойстики:


Сразу под формой выбирается тип джойстика в выпадающем списке «Тип». Здесь можно выбрать одно из следующих значений: «Независимые моторы», «Руление 1», «Руление 2» и «Почтовый ящик».
Джойстики с типами «Руление 1» и «Руление 2» позволяют управлять роботом с двумя независимыми ведущими колёсами, таким как Исследователь EV3. Координаты прикосновения к таким джойстикам будут автоматически трансформироваться в команды двигателям. Для джойстика нужно будет только выбрать, на каком порту будет левое, а на каком правое колёса. Но об этом будет написано чуть ниже.
«Руление 1» позволит управлять двухколёсным роботом, как автомобилем. Здесь вы не сможете развернуть робота на месте. Чем ближе касание к центру по вертикали, тем ниже скорость. «Руление 2» позволяет роботу крутиться на месте.
Джойстик с типом «Независимые моторы» преобразует горизонтальную координату касания в команды мотору независимо от вертикальной координаты. Для джойстика нужно будет указать, какой мотор будет управляться при изменении горизонтальной координаты, а какой при изменении вертикальной координаты. Этот тип джойстика можно использовать для управления машиной, у которой один мотор поворачивает руль, а второй мотор крутит ведущие колёса. В этом случае изменение горизонтальной координаты нужно настроить на вращение первого мотора, а изменение вертикальной координаты – на вращение второго мотора.
Джойстик с типом «Почтовый ящик» будет просто передавать координаты прикосновения в почтовые ящики EV3. Чтобы ваш робот ожил, вам нужно будет написать программу для EV3, которая будет обрабатывать эти координаты. С помощью джойстика такого типа вы можете сделать более сложные модели управления роботом, т.к. можете реализовать свой собственный алгоритм преобразования координат снятых с джойстика в команды моторам. Например, вы сможете сделать управление Гиробоем EV3. Джойстик 1 передаёт координаты в почтовые ящики с именами x и y, джойстик 2 – в почтовые ящики w и z, джойстик 3 – в почтовые ящики a и b и джойстик 4 – в почтовые ящики c и d.
Следующие две настройки «Окончание прикосновения (для горизонтальной оси)» и «Окончание прикосновения (для вертикальной оси)» определяют, что будет происходить, когда вы перестали прикасаться к джойстику. Здесь можно выбрать один из двух вариантов: «Возвращаться к нулю» или «Сохранять позицию». Возвращение к нулю имеет смысл использовать в большинстве ситуаций, например, если вам нужно чтобы робот остановился, когда вы перестали прикасаться к джойстику, как раз подходит вариант «Возвращаться к нулю». Вариант с сохранением позиции будет полезен, когда нужно помнить последнюю координату касания. Этот вариант используется, например, для наклона рамки Исследователя EV3. Эта настройка доступна для всех форм джойстика кроме джойстиков-стрелок.
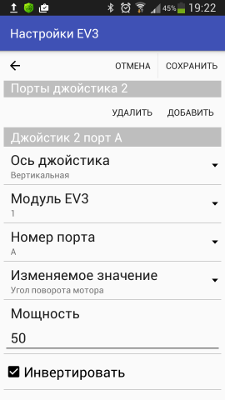
Если вы используете тип джойстика «Независимые моторы», «Руление 1» или «Руление 2», то ниже вы найдёте настройки портов для этого джойстика. Порты, которыми будет управлять джойстик можно добавлять и удалять. Для этого есть кнопки «ДОБАВИТЬ» и «УДАЛИТЬ». Количество портов не ограничено. Снизу на первом рисунке показаны настройки для джойстика с типом «Независимые моторы», а на втором рисунке для джойстика с типами «Руление 1» и «Руление 2». Как видите, есть небольшая разница.
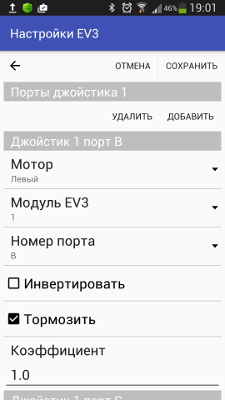
Настройка «Мотор» появляется только для джойстика с типом «Руление 1» или «Руление 2». Здесь вы выбираете между «Левый» и «Правый».
Настройка «Модуль EV3» понадобится, если вы собрали робота с использование нескольких модулей EV3, соединённых в «гирлянду». Здесь можно выбрать номер модуля от 1 до 4. Если у вас используется только один модуль EV3, то здесь всегда должна быть 1.
Настройкой «Номер порта» вы можете выбрать порт мотора от A до D.
Настройка «Изменяемое значение» появляется только для джойстика с типом «Независимые моторы». Здесь возможно два варианта: «Мощность мотора» и «Угол поворота мотора». Если вы выбрали «Мощность мотора», то джойстик будет влиять на мощность мотора, т.е. чем дальше от центра джойстика вы касаетесь, тем быстрее будет крутиться мотор. Если вы выбрали «Угол поворота мотора», то джойстик будет влиять на угол поворота мотора, т.е. чем дальше от центра джойстика вы касаетесь, тем на больший угол повернётся мотор. В этом случае мощность для мотора будет настраиваться настройкой «Мощность». Чем больше будет эта цифра, тем быстрее мотор будет реагировать на изменение координаты касания, и тем лучше он будет держать угол.
Установка галочки «Инвертировать» позволит инвертировать вычисленную мощность или угол, а «Коэффициент» увеличить или уменьшить вычисленное значение.
При установке галочки «Тормозить», моторы будут останавливаться быстро, т.е. будут тормозить. При снятии этой галочки моторы будут некоторое время крутиться по инерции до полной остановки.
Вот собственно и все настройки, которые есть в программе RoboCam. Если что-то непонятно, пишите в комментариях.
Подключение без роутера
Теперь немного трюков, которые могут сделать использование приложения RoboCam немного удобнее. Если поблизости нет роутера, например, если вы находитесь на улице, вы можете организовать подключение между смартфоном 1 и смартфоном или планшетом 2 напрямую. Для этого вам нужно включить точку доступа на смартфоне 1 (точка доступа в системе Android обычно включается в настройках сетевых подключений). После включения смартфон 1 превратится в роутер W-Fi и вы без проблем сможете подключить к нему планшет или смартфон 2. Вот так схематично будет выглядеть подключение.
Адрес сервера RoboCam вы сможете точно так же узнать из подсказки к кнопке. В большинстве случаев, для такой точки доступа адрес всегда будет http://192.168.43.1:8088.
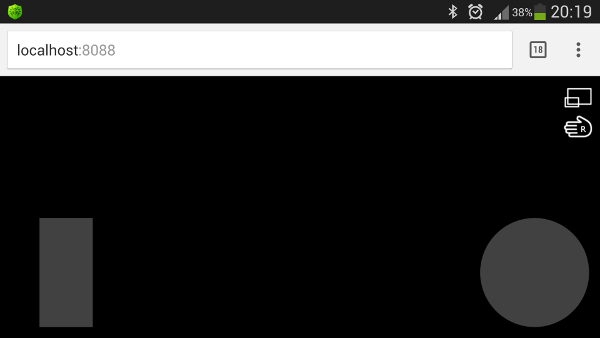
Использование смартфона 1 как джойстик
Есть ещё один трюк, который вы можете проделать с приложением RoboCam. На смартфоне 1 (на котором у вас установлено приложение RoboCam) запустите сервер, подключитесь к роботу, а затем на этом же смартфоне запустите браузер (естественно такой, который поддерживает HTML5) и перейдите по адресу http://localhost:8088. Вы увидите страничку для ввода логина и пароля. Войдите как водитель. После входа вы увидите джойстики и сможете управлять роботом. Правда в этом случае изображение с камеры передаваться не будет. Wi-Fi можно отключить.
Надеюсь, я дал достаточное количество информации о том, как можно использовать приложение RoboCam. Если остались вопросы по программе или есть предложения, можете оставлять их в комментариях к этой статье или в сообществе RoboCam.